








 The Right Approach: I Hear the Train A Comin'
The Right Approach: I Hear the Train A Comin' It’s Only Common Sense: OCCAM—the Time Is Now
It’s Only Common Sense: OCCAM—the Time Is Now Marcy's Musings: The Growing Industry
Marcy's Musings: The Growing IndustryHow to Build a Robot That Mimics the Moves of Animals — and Why You’d Want To
June 13, 2018 | USCEstimated reading time: 2 minutes
From slithering and walking to flying or swimming, animals are able to move and interact with their environment with relative ease. However, building a robot with the same capabilities is much more difficult.
“Roboticists watch creatures in the natural world with a great deal of envy,” said Satyandra “S.K.” Gupta, who holds a Smith International Professorship in Mechanical Engineering at the USC Viterbi School of Engineering.
“Taking inspiration from nature offers new possibilities for realizing novel robots. As such, bio-inspired robotics has emerged as an important specialization within the field of robotics,” said Gupta, associate department chair for the Department of Aerospace and Mechanical Engineering and director of the Center for Advanced Manufacture.
By mimicking natural movements, these creaturelike robots can go where traditional robots cannot, such as the difficult terrain of disaster sites. They can be used to save lives, improve security or explore remote locations. In addition, adapting biological attributes can lead to more robust or energy efficient robots.
Robots mimicking animals: new possibilities
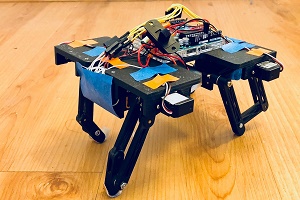
In “Biologically Inspired Robotics,” an undergraduate course taught by Gupta, students looked to nature for new possibilities in robotic design. After learning about the fundamentals of traditional robotics and the role of biologically inspired design, students were tasked with building and programming their very own robot based on the movements of animals.
Daiming Yang, Chenchen Huang and Shijing Lu chose to build a four-legged robot that mimics the movement of a cat.
Unlike dogs or horses, cats walk with their front legs bent forward rather than backward, which may create “singularities” in robotic motion analysis, Yang said.
Another team opted to create a robot that walked sideways like a crab.
“Our team tried to capture the passively stable dynamics [series of falls] that crabs make when they walk slowly,” said Pamela Denny, whose teammates included Mary Bessell and Yan Zhang. “The most difficult task was putting the robot together and removing all the friction from the joints. This was a very detailed and complex task as there were 12 joints to set, align and adjust.”
In late April, the nine teams presented their projects to the class and demonstrated their robot’s unique ability. By walking, crawling or side-stepping, each robot made its way down a track 30 times longer than the length of its body, signifying the success of a semester-long effort.
“Our team was so happy to create a crab that actually worked,” Denny said. “It was a lot of fun and I highly recommend the class.”
Share on:




Suggested Items
Cicor Records Solid Growth in Q1
04/16/2024 | CicorThe Cicor Group continued to grow in the first three months of the year. Quarterly sales increased by 11.8% to CHF 107.3 million compared to the first quarter of the previous year (Q1/2023: CHF 96.0 million).
TT Electronics Awarded Contract with Kongsberg Defence and Aerospace
04/11/2024 | TT ElectronicsTT Electronics, a leading provider of global manufacturing solutions and engineered technologies, announced today that its Fairford UK business has been awarded a new contract with long-standing customer Kongsberg Defence and Aerospace (Kongsberg) for the production of complex cable harness solutions.
Cicor Successfully Completes Acquisition of TT Electronics IoT Solutions Ltd.
04/03/2024 | CicorThe Cicor Group has successfully completed the acquisition of TT Electronics IoT Solutions Ltd. with three production sites in the UK and China.
Absolute EMS Successfully Recertifies ISO 9001:2015 and AS9100 Standards
03/26/2024 | Absolute EMS, Inc.Absolute EMS, Inc., an award-winning EMS provider of turnkey contract manufacturing services, is proud to announce the successful recertification of its ISO 9001:2015 and AS9100 Rev D SAE International Aerospace Standards.
Arlon EMC Receives IPC-4101 QPL Recertification
03/20/2024 | Arlon Electronic MaterialsArlon Electronic Materials has successfully completed an intensive two-day recertification audit by IPC Validation Services that examined Arlon’s manufacturing processes and testing procedures to assure that they are in conformance to the requirements of IPC-4101E-WAM1, the Specification for Base Materials for Rigid and Multilayer Printed Boards.